机器人视觉
通过深度学习、图像处理和模式识别等领先技术的整合,能够实现机器人对复杂环境的高效感知与理解,实时识别和定位目标以及执行精准的视觉导航,理解并自主决策,实现高度精准的任务执行。通过机器视觉技术使得智能机器人在提高生产效率、改善服务体验、强化安全监控等方面发挥关键作用,为未来智能机器人应用打开了广阔的发展前景。
核心视觉技术
图像处理
RGB深度图像运算、PCD点云图运算、灰度化、边缘检测、图像分割与压缩等
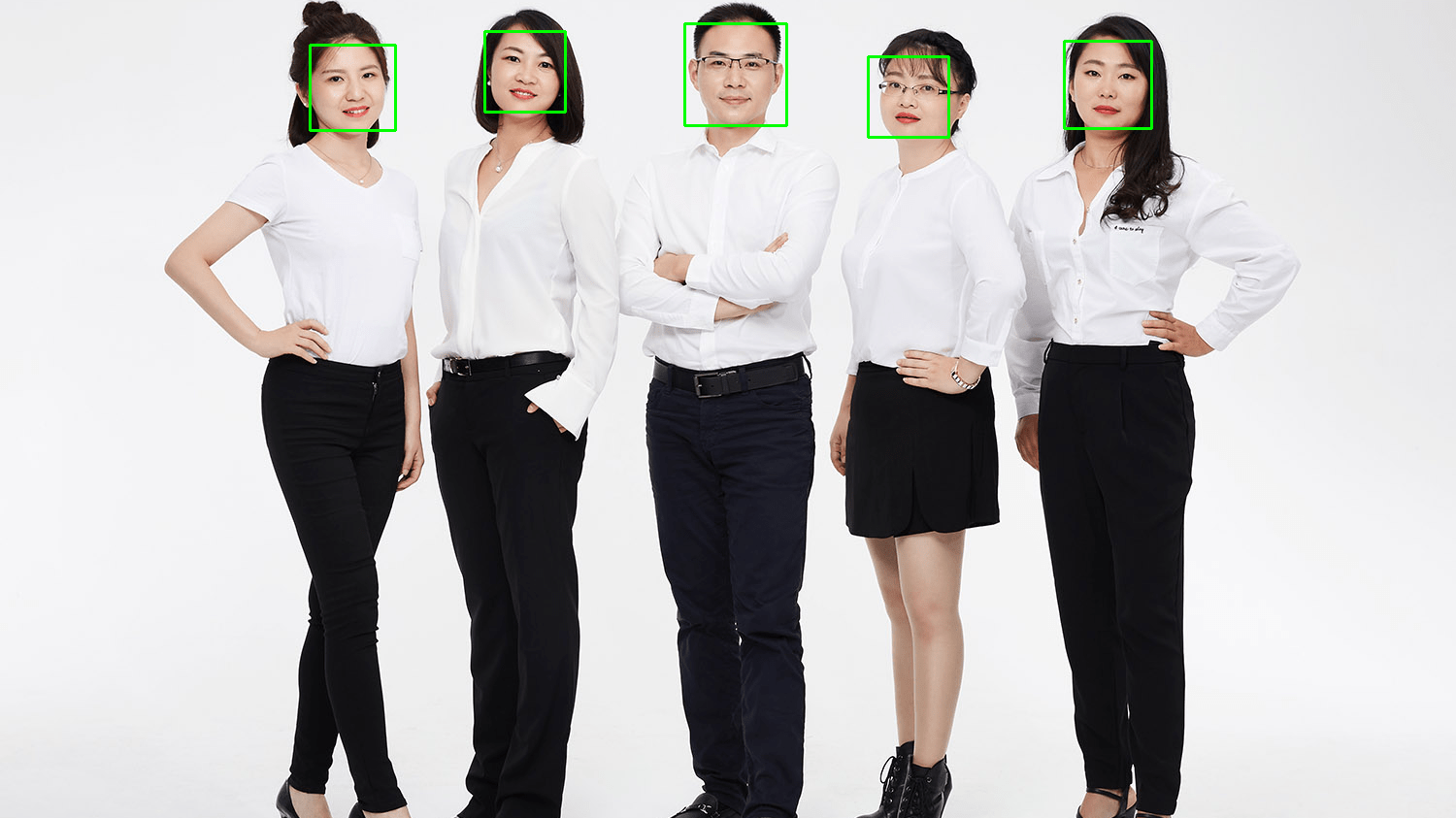
人脸检测
图像预处理、人脸检测模型、分类器训练、人脸识别、特征提取、多角度检测等

人体姿态及特征检测
目标检测与追踪、光流分析、时空特征提取、实时处理、模型优化与轻量化等

行为识别分析
基于目标检测算法进行目标检测和追踪、数据标注与训练集、OpenPose姿态估计、异常检测等
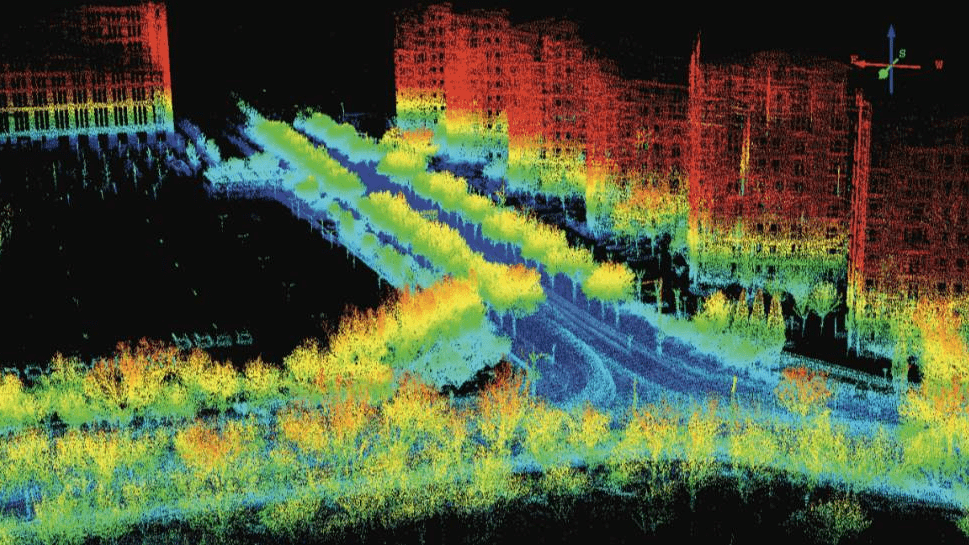
深度相机
采用了高效的ORB特征点提取和描述符匹配技术,从而实现了高速、实时的地图构建和相机定位

物体识别
运用深度学习和卷积神经网络等技术,通过对大量数据的学习,实现高效准确的物体检测与识别
机器人视觉应用
智能巡检机器人
- 环境感知与导航:机器人通过视觉传感器获取环境信息,如摄像头、激光雷达等,实现对周围环境的感知。
- 目标检测与识别:机器人能够识别巡检区域内的目标对象,如车辆、人员、设备、管道、设施等。
- 自主决策与路径规划:基于视觉信息,机器人可以进行实时的自主决策,调整巡检路径,应对复杂环境。
- 实时监测与报警:实现了对设备和环境的实时监测,一旦发现异常,如温度升高、异常振动等,机器人能够及时报警。
机械臂抓取
- 精准目标定位:通过图像识别和处理,能够精准地定位目标物体的位置,实现对抓取点的准确控制。
- 实时环境感知:通过实时的图像采集和处理,机械臂能够持续感知环境变化,适时调整抓取策略,以适应复杂、动态的工作环境。
- 物体形状与大小识别:可以识别目标物体的形状和大小,使机械臂能够根据不同特征采用合适的抓取方式,增加抓取成功的概率。
- 深度学习增强抓取能:机器视觉系统能够从大量数据中学习抓取策略,提高机械臂的抓取能力,尤其对于复杂、多变形状的物体。